![]()

A Julia library implementing an Adaptive Sparse Grid collocation method for integrating memory-heavy objects generated on distributed workers.
For an alternative implementation, see AdaptiveSparseGrids.jl.
Efficient methods for the numerical integration (or interpolation) of one-dimensional functions can be directly applied to the multidimensional case via tensor-product constructions. However, the higher the number of dimensions, the less efficient this approach is. A problem which is also known as the curse of dimensionality.
Any integral
can be mapped onto the hypercube
To mitigate the curse of dimensionality that occurs in the integration or interpolation of multidimensional functions on the hypercube, sparse grids use Smolyak's quadrature rule. This is particularly useful if the evaluation of the underlying function is costly. In this library, an Adaptive Sparse Grid Collocation method with a local hierarchical Lagrangian basis, first proposed by Ma and Zabaras (2010), is implemented. For more information about the construction of Sparse Grids, see e.g. Gates and Bittens (2015).
There exists a JOSS paper about this package. You can cite it if you are using this software for academic purposes.
import Pkg
Pkg.add("DistributedSparseGrids")- Nested one-dimensional Clenshaw-Curtis rule
- Smolyak's sparse grid construction
- local hierarchical Lagrangian basis
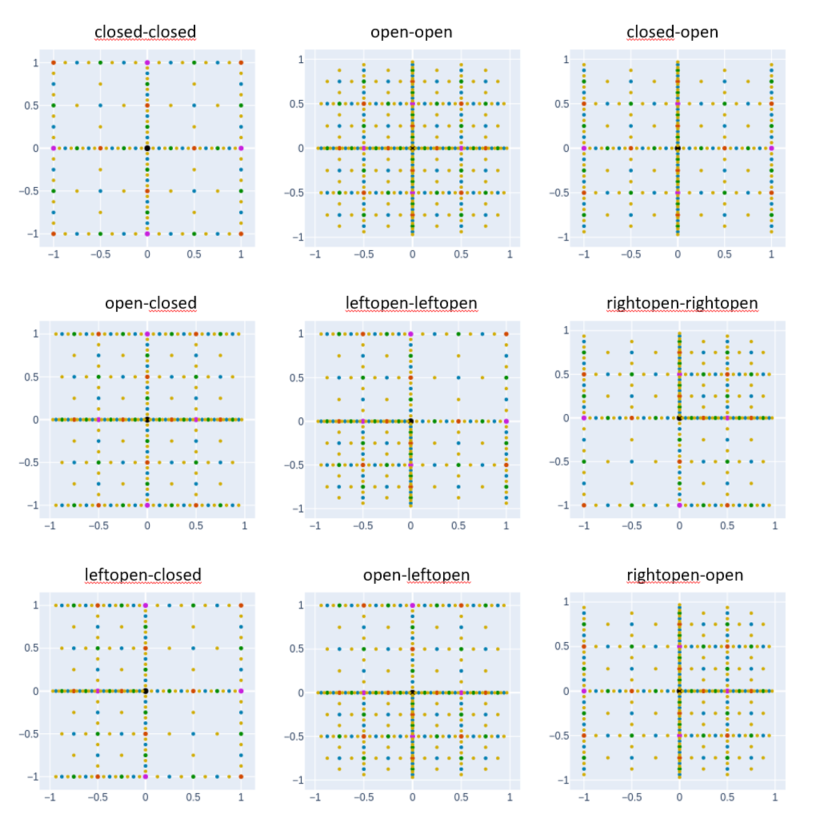
- different pointsets (open, closed, halfopen)
- adaptive refinement
- distributed function evaluation with
Distributed.remotecall_fetch - multi-threaded calculation of basis coefficients with
Threads.@threads - usage of arbitrary input, collocation point, and return types
- integration
- experimental: integration over
$X_{\sim (i)}$ (the$X_{\sim (i)}$ notation indicates the set of all variables except$X_{i}$ ).
- The quality of the error prediction depends on the number of collocation points. Therefore, for only a few collocation points, adaptive refinement may fail. Therefore it is recommended to generate some initial levels before using adaptive refinement (see examples).
- The interpolation is based on a local Lagrangian basis. Functions with discontinuities cannot be approximated.
- Sparse grid interpolation and integration will work best with a number of dimension between 1 and 6.
- The domain of the sparse grid is always
$[-1,1]^n$ . The user is responsible to map the input onto this domain.
When using sparse grids, one can choose whether the
using DistributedSparseGrids
using StaticArrays
function sparse_grid(N::Int,pointprops,nlevel=6,RT=Float64,CT=Float64)
# define collocation point
CPType = CollocationPoint{N,CT}
# define hierarchical collocation point
HCPType = HierarchicalCollocationPoint{N,CPType,RT}
# init grid
asg = init(AHSG{N,HCPType},pointprops)
#set of all collocation points
cpts = Set{HierarchicalCollocationPoint{N,CPType,RT}}(collect(asg))
# fully refine grid nlevel-1 times
for i = 1:nlevel-1
union!(cpts,generate_next_level!(asg))
end
return asg
end
# define point properties
# 1->closed point set
# 2->open point set
# 3->left-open point set
# 4->right-open point set
asg01 = sparse_grid(1, @SVector [1])
asg02 = sparse_grid(1, @SVector [2])
asg03 = sparse_grid(1, @SVector [3])
asg04 = sparse_grid(2, @SVector [1,1])
asg05 = sparse_grid(2, @SVector [2,2])
asg06 = sparse_grid(2, @SVector [1,2])
asg07 = sparse_grid(2, @SVector [2,1])
asg08 = sparse_grid(2, @SVector [3,3])
asg09 = sparse_grid(2, @SVector [4,4])
asg10 = sparse_grid(2, @SVector [3,1])
asg11 = sparse_grid(2, @SVector [2,3])
asg12 = sparse_grid(2, @SVector [4,2]) 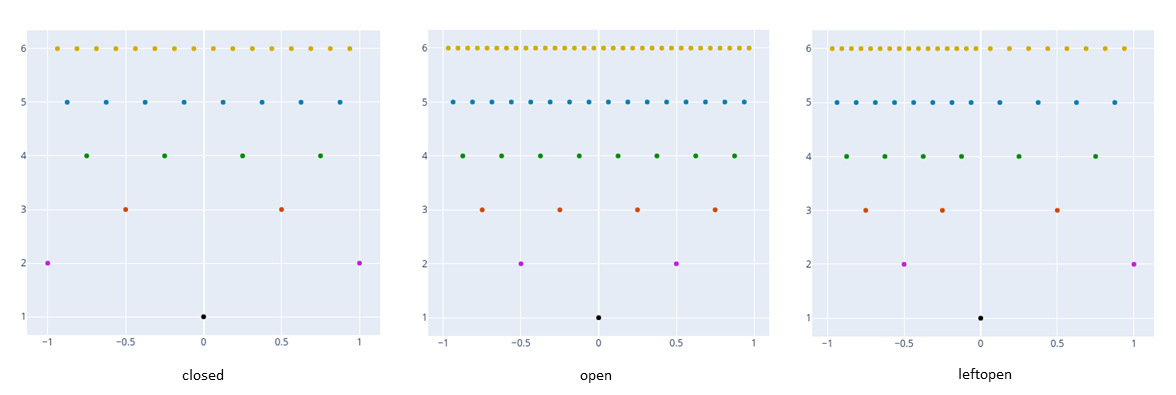
asg = sparse_grid(4, @SVector [1,1,1,1])
#define function: input are the coordinates x::SVector{N,CT} and an unique id ID::String (e.g. "1_1_1_1")
fun1(x::SVector{N,CT},ID::String) = sum(x.^2)
# initialize weights
@time init_weights!(asg, fun1)
# integration
integrate(asg)
# interpolation
x = rand(4)*2.0 .- 1.0
val = interpolate(asg,x) asg = sparse_grid(4, @SVector [1,1,1,1])
# add worker and register function to all workers
using Distributed
addprocs(2)
ar_worker = workers()
@everywhere begin
using StaticArrays
fun2(x::SVector{4,Float64},ID::String) = 1.0
end
# Evaluate the function on 2 workers
distributed_init_weights!(asg, fun2, ar_worker)For custom return type T to work, following functions have to be implemented
import Base: +,-,*,/,^,zero,zeros,one,ones,copy,deepcopy
+(a::T, b::T)
+(a::T, b::Float64)
*(a::T, b::Float64)
-(a::T, b::Matrix{Float64})
-(a::T, b::Float64)
zero(a::T)
zeros(a::T)
one(a::T)
one(a::T)
copy(a::T)
deepcopy(a::T)This is already the case for many data types. Below RT=Matrix{Float64} is used.
# sparse grid with 5 dimensions and levels
pointprops = @SVector [1,2,3,4,1]
asg = sparse_grid(5, pointprops, 6, Matrix{Float64})
# define function: input are the coordinates x::SVector{N,CT} and an unique id ID::String (e.g. "1_1_1_1_1_1_1_1_1_1"
# for the root poin in five dimensions)
fun3(x::SVector{N,CT},ID::String) = ones(100,100).*x[1]
# initialize weights
@time init_weights!(asg, fun3)There are many mathematical operations executed which allocate memory while evaluting the hierarchical interpolator. Many of these allocations can be avoided by additionally implementing the inplace operations interface for data type T.
import LinearAlgebra, AltInplaceOpsInterface
LinearAlgebra.mul!(a::T, b::Float64)
LinearAlgebra.mul!(a:T, b::T, c::Float64)
AltInplaceOpsInterface.add!(a::T, b::T)
AltInplaceOpsInterface.add!(a::T, b::Float64)
AltInplaceOpsInterface.minus!(a::T, b::Float64)
AltInplaceOpsInterface.minus!(a::T, b::T)
AltInplaceOpsInterface.pow!(a::T, b::Float64)For Matrix{Float64} this interface is already implemented.
# initialize weights
@time init_weights_inplace_ops!(asg, fun3)# initialize weights
@time distributed_init_weights_inplace_ops!(asg, fun3, ar_worker)# Sparse Grid with 4 initial levels
pp = @SVector [1,1]
asg = sparse_grid(2, pp, 4)
# Function with curved singularity
fun1(x::SVector{2,Float64},ID::String) = (1.0-exp(-1.0*(abs(2.0 - (x[1]-1.0)^2.0 - (x[2]-1.0)^2.0) +0.01)))/(abs(2-(x[1]-1.0)^2.0-(x[2]-1.0)^2.0)+0.01)
init_weights!(asg, fun1)
# adaptive refine
for i = 1:20
# call generate_next_level! with tol=1e-5 and maxlevels=20
cpts = generate_next_level!(asg, 1e-5, 20)
init_weights!(asg, collect(cpts), fun1)
end
# plot
import PlotlyJS
surfplot = PlotlyJS.surface(asg, 100)
gridplot = PlotlyJS.scatter3d(asg)
PlotlyJS.plot([surfplot, gridplot])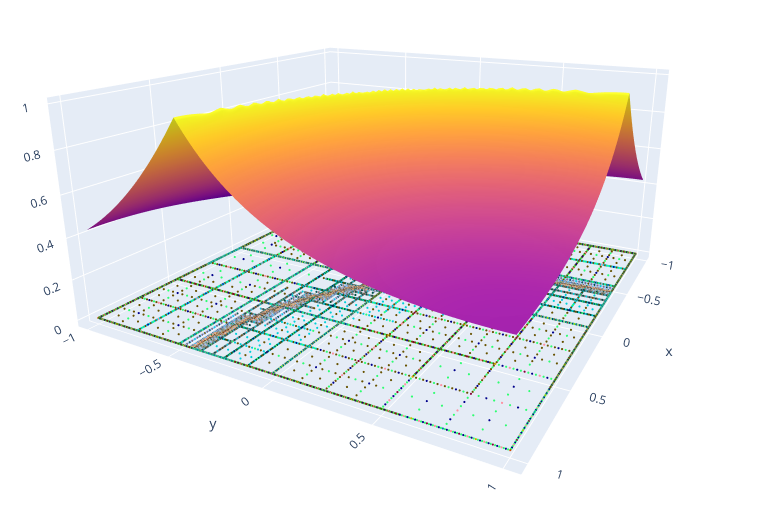
# grid plots
PlotlyJS.scatter(sg::AbstractHierarchicalSparseGrid{1,HCP}, lvl_offset::Bool=false; kwargs...)
UnicodePlots.scatterplot(sg::AbstractHierarchicalSparseGrid{1,HCP}, lvl_offset::Bool=false)
# response function plots
UnicodePlots.lineplot(asg::AbstractHierarchicalSparseGrid{1,HCP}, npts = 1000, stoplevel::Int=numlevels(asg))
PlotlyJS.surface(asg::SG, npts = 1000, stoplevel::Int=numlevels(asg); kwargs...)# grid plots
PlotlyJS.scatter(sg::AbstractHierarchicalSparseGrid{2,HCP}, lvl_offset::Float64=0.0, color_order::Bool=false)
UnicodePlots.scatterplot(sg::AbstractHierarchicalSparseGrid{2,HCP})
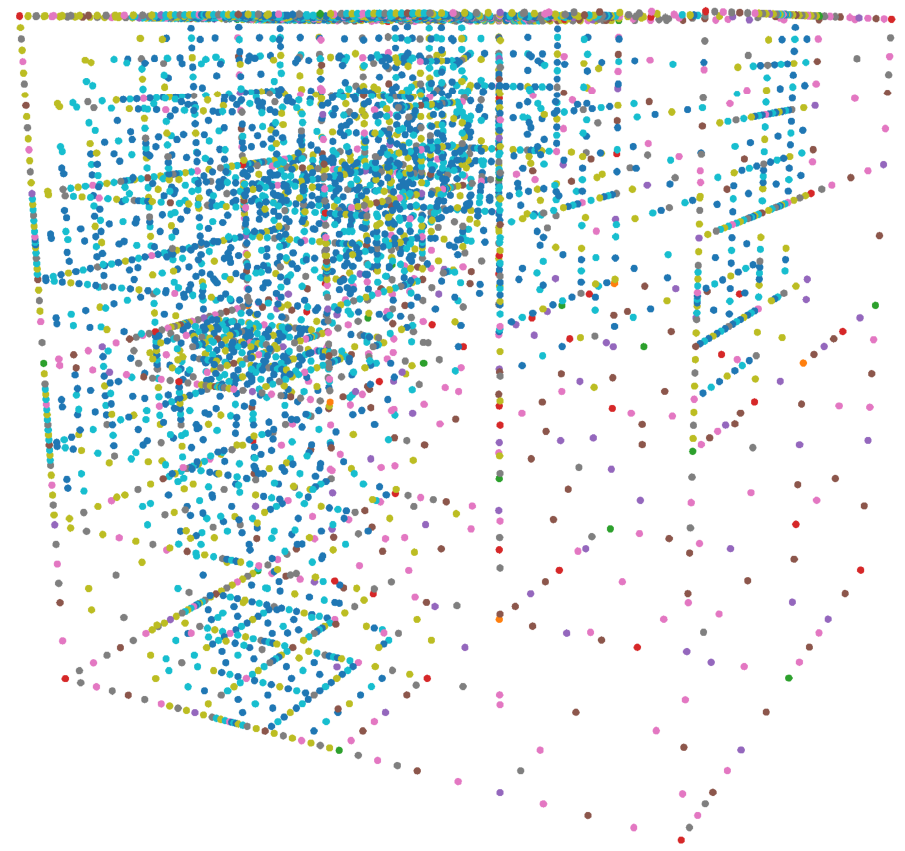
PlotlyJS.scatter3d(sg::AbstractHierarchicalSparseGrid{2,HCP}, color_order::Bool=false, maxp::Int=1)
# response function plot
PlotlyJS.surface(asg::AbstractHierarchicalSparseGrid{2,HCP}, npts = 20; kwargs...)# grid plot
PlotlyJS.scatter3d(sg::AbstractHierarchicalSparseGrid{3,HCP}, color_order::Bool=false, maxp::Int=1)- nonlinear basis functions
- wavelet basis
Contributions to or questions about this project are welcome. Feel free to create a issue or a pull request on GitHub.