
![]()

MultiScaleArrays.jl allows you to easily build multiple scale models which are
fully compatible with native Julia scientific computing packages like
DifferentialEquations.jl or Optim.jl. These models utilize
a tree structure to describe phenomena of multiple scales, but the interface allows
you to describe equations on different levels, using aggregations from lower
levels to describe complex systems. Their structure allows for complex and dynamic
models to be developed with only a small performance difference. In the end, they present
themselves as an AbstractArray to standard solvers, allowing them to be used
in place of a Vector in any appropriately made Julia package.
For information on using the package, see the stable documentation. Use the in-development documentation for the version of the documentation, which contains the unreleased features.
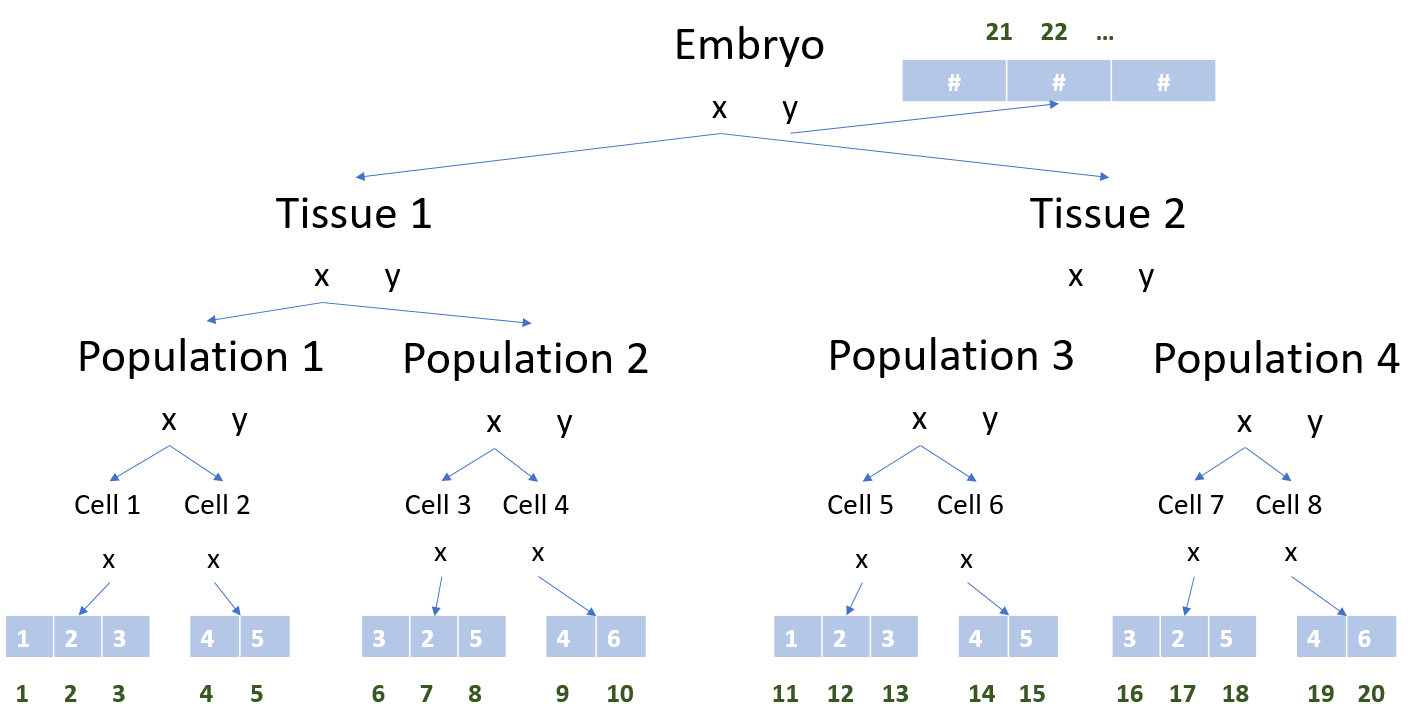
The usage is best described by an example. Here we build a hierarchy where Embryos contain Tissues which contain Populations which contain Cells, and the cells contain proteins whose concentrations are modeled as simply a vector of numbers (it can be anything linearly indexable).
using MultiScaleArrays
struct Cell{B} <: AbstractMultiScaleArrayLeaf{B}
values::Vector{B}
end
struct Population{T <: AbstractMultiScaleArray, B <: Number} <: AbstractMultiScaleArray{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
end
struct Tissue{T <: AbstractMultiScaleArray, B <: Number} <: AbstractMultiScaleArray{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
end
struct Embryo{T <: AbstractMultiScaleArray, B <: Number} <: AbstractMultiScaleArrayHead{B}
nodes::Vector{T}
values::Vector{B}
end_idxs::Vector{Int}
endThis setup defines a type structure which is both a tree and an array. A picture of a possible version is the following:
cell1 = Cell([1.0; 2.0; 3.0])
cell2 = Cell([4.0; 5.0])and build types higher up in the hierarchy by using the constuct method. The method
is construct(T::AbstractMultiScaleArray, nodes, values), though if values is not given it's
taken to be empty.
cell3 = Cell([3.0; 2.0; 5.0])
cell4 = Cell([4.0; 6.0])
population = construct(Population, deepcopy([cell1, cell3, cell4]))
population2 = construct(Population, deepcopy([cell1, cell3, cell4]))
population3 = construct(Population, deepcopy([cell1, cell3, cell4]))
tissue1 = construct(Tissue, deepcopy([population, population2, population3])) # Make a Tissue from Populations
tissue2 = construct(Tissue, deepcopy([population2, population, population3]))
embryo = construct(Embryo, deepcopy([tissue1, tissue2])) # Make an embryo from Tissues